Bridging the
Care Gap
Sweden's population aged 80 and over will grow by 50% in the next decade. Professional caregivers are in decline. SAInt addresses this structural challenge with agentic robotics.
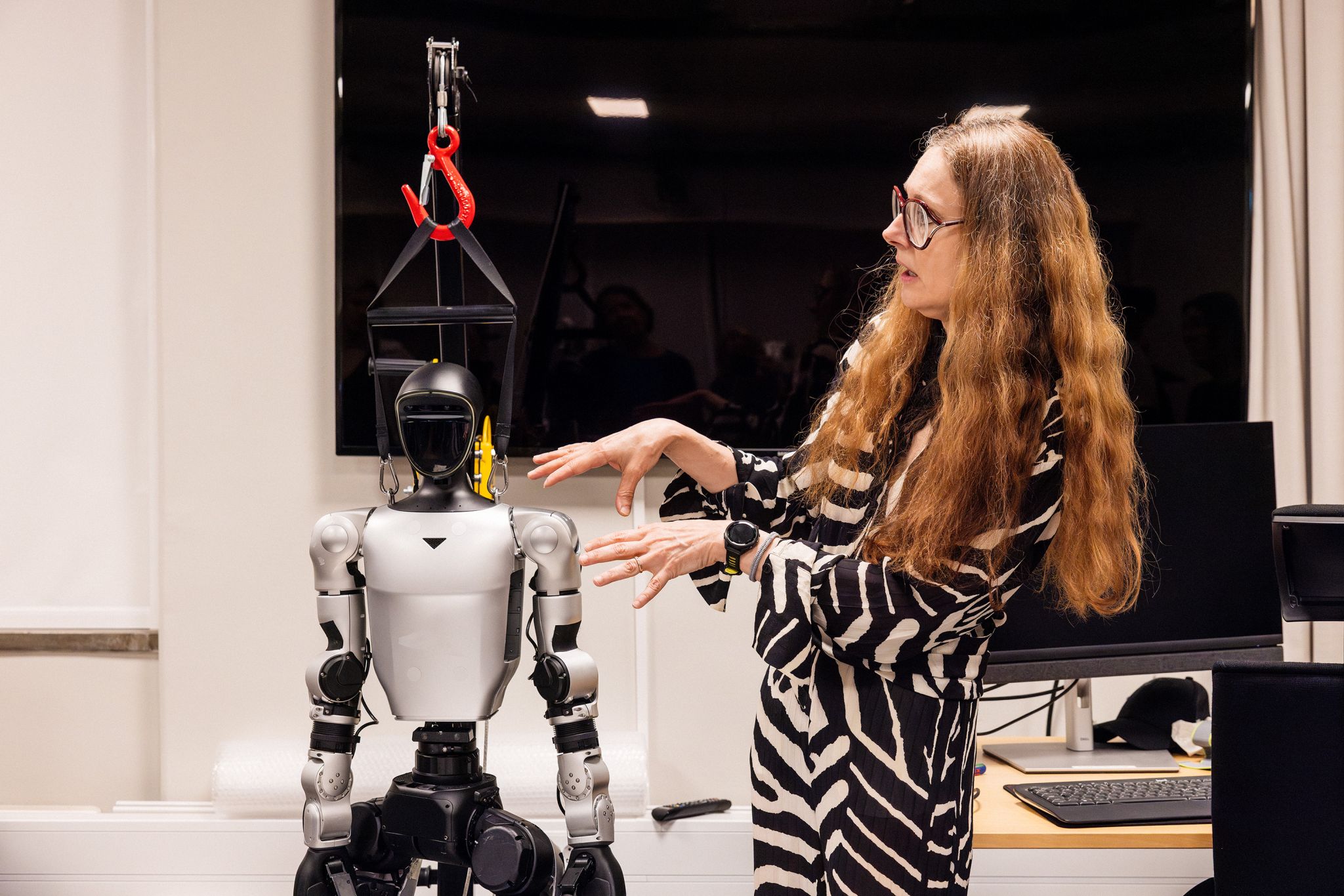
The convergence of physically capable humanoid robots - such as 1X Neo, Figure A03, Tesla Optimus, BostonDynamics Atlas, Rainbow HRN-Y1 and Unitree H1 - with large language and vision models creates the first genuine technical foundation for domestic robotic assistance.
SAInt (Situated Agentic Interaction) is a five year project funded by Promobilia. It moves beyond conventional assistive robotics, which rely on explicit command structures, toward agentic partners capable of contextual understanding, goal inference through natural communication, and proactive collaboration integrated into daily activities.
The SAInt robot is designed not to replace human care, but to augment it, providing a continuous safety net between scheduled visits and empowering individuals to live on their own terms.